As the automotive industry pivots toward the Software-Defined Vehicle (SDV), the constraints of traditional distributed electronic architectures have become impossible to ignore. For decades, vehicles relied on domain-based architectures, where discrete Electronic Control Units (ECUs) managed isolated functions via low-bandwidth protocols like CAN and LIN. Today, with the surge in ADAS sensor fusion, autonomous driving capabilities, and AI-driven cockpit experiences, those legacy networks have reached a breaking point. The solution is the Zonal E/E Architecture, powered by a high-bandwidth, deterministic Ethernet backbone.
1. The Architecture Shift: From Domains to Zones
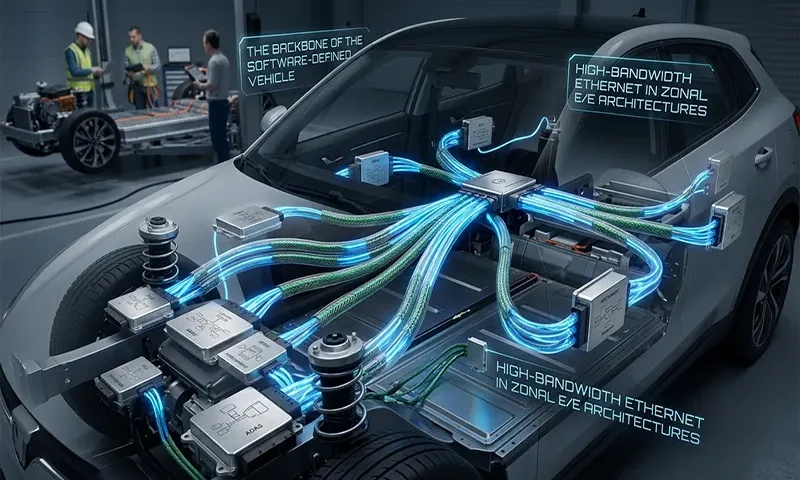
The transition to zonal architecture represents a fundamental mindset shift in vehicle design. Instead of grouping ECUs by function (e.g., powertrain, body, infotainment), a zonal architecture organizes the vehicle by physical location: front-left, front-right, rear-left, rear-right, and cabin.
In this framework, Zonal Control Units (ZCUs) act as local gateways, aggregating sensor data and power distribution for their specific geographic …
View More The Backbone of the Software-Defined Vehicle: High-Bandwidth Ethernet in Zonal E/E Architectures