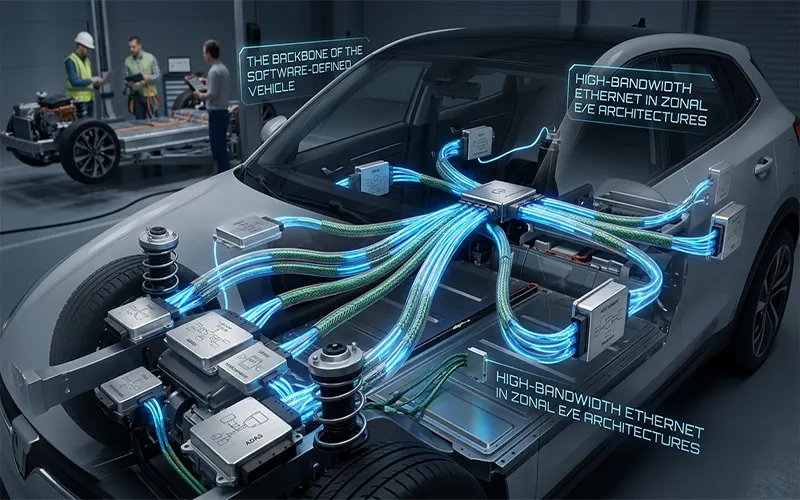
As the automotive industry pivots toward the Software-Defined Vehicle (SDV), the constraints of traditional distributed electronic architectures have become impossible to ignore. For decades, vehicles relied on domain-based architectures, where discrete Electronic Control Units (ECUs) managed isolated functions via low-bandwidth protocols like CAN and LIN. Today, with the surge in ADAS sensor fusion, autonomous driving capabilities, and AI-driven cockpit experiences, those legacy networks have reached a breaking point. The solution is the Zonal E/E Architecture, powered by a high-bandwidth, deterministic Ethernet backbone.
1. The Architecture Shift: From Domains to Zones
The transition to zonal architecture represents a fundamental mindset shift in vehicle design. Instead of grouping ECUs by function (e.g., powertrain, body, infotainment), a zonal architecture organizes the vehicle by physical location: front-left, front-right, rear-left, rear-right, and cabin.
In this framework, Zonal Control Units (ZCUs) act as local gateways, aggregating sensor data and power distribution for their specific geographic quadrant. These ZCUs then interface with a central high-performance computing (HPC) node. This consolidation drastically reduces wiring harness length—often saving dozens of kilograms of copper—and creates a scalable framework where hardware and software can be decoupled, allowing for continuous OTA (Over-the-Air) feature deployment.
2. The Ethernet Imperative
As sensor counts increase to support Level 2+ and Level 3 autonomous features, the data volume is staggering. Multiple 8MP cameras, high-resolution LiDAR, and 4D imaging radars produce data streams that simply cannot be handled by traditional buses.
Automotive Ethernet—scaling from 10BASE-T1S for low-speed peripherals to multi-gigabit backbones (2.5/5/10 Gbps)—provides the necessary throughput. By moving to Ethernet, OEMs can transition from point-to-point wiring to a switched network topology. This shift allows for asynchronous data transmission and simplifies the integration of third-party sensor modules, as standard Ethernet interfaces provide a plug-and-play capability that proprietary serial protocols lack.
3. Deterministic Networking: The Role of TSN
While high bandwidth is essential, it is not sufficient for automotive safety. Ethernet is inherently non-deterministic, meaning there is no guarantee that a data packet will arrive within a specific time window. In safety-critical systems like braking, steering, and emergency collision avoidance, “best-effort” delivery is a non-starter.
This is where Time-Sensitive Networking (TSN) standards become the cornerstone of the zonal network:
- IEEE 802.1AS (Timing and Synchronization): Ensures that all nodes in the network share a unified time base with sub-microsecond accuracy, critical for sensor fusion (e.g., aligning LiDAR and camera data).
- IEEE 802.1Qbv (Time-Aware Shaper): Enables scheduled traffic, guaranteeing that high-priority safety data is transmitted in protected time windows.
- IEEE 802.1Qbu (Frame Preemption): Allows a critical safety message to interrupt a non-critical infotainment packet, ensuring zero-latency spikes for urgent control commands.
- IEEE 802.1CB (Seamless Redundancy): Duplicates critical data streams across different physical paths, ensuring the system remains operational even if a single cable or switch fails.
4. Network Topology & Resilience
In a zonal network, the central compute node acts as the “brain,” while the zonal switches function as the “nervous system.” To ensure resilience, 2026-era architectures typically employ a redundant Ethernet backbone. If a primary link is severed, the network reroutes traffic instantaneously.
Modern zonal gateways also utilize hardware-level isolation. Through the use of hypervisors and virtual local area networks (VLANs), an OEM can run safety-critical ADAS functions and non-critical diagnostic logs on the same physical wire without risk of cross-interference. This “mixed-criticality” management is what enables the SDV to remain both safe and highly customizable.
5. Security at the Edge
As the vehicle becomes an “edge node” in the broader transport ecosystem, cybersecurity becomes a primary architectural pillar. A zonal architecture centralizes the security burden, making it easier to monitor traffic and enforce policy.
- MACsec (IEEE 802.1AE): Provides line-rate encryption and authentication at the data link layer, ensuring that even if an attacker gains physical access to the vehicle, they cannot inject malicious packets into the backbone.
- Hardware Security Modules (HSM): Each zonal controller integrates an HSM to manage secure boot, code signing, and key storage, ensuring that only cryptographically verified software can execute within the vehicle.
6. Future-Proofing: The 50 Gbps Horizon
While 10 Gbps Ethernet is the benchmark for high-end 2026 vehicles, the industry is already looking toward the next horizon. We are beginning to see research into PCIe-over-Ethernet and optical Ethernet backbones, designed to support the 50+ Gbps throughput required for future autonomous agents and high-definition immersive displays.
By standardizing on a zonal architecture today, OEMs are building a foundation that is not just a collection of parts, but a programmable, scalable platform. The Ethernet backbone is no longer just a communication pipe; it is the fundamental infrastructure upon which the entire future of mobility is being built.